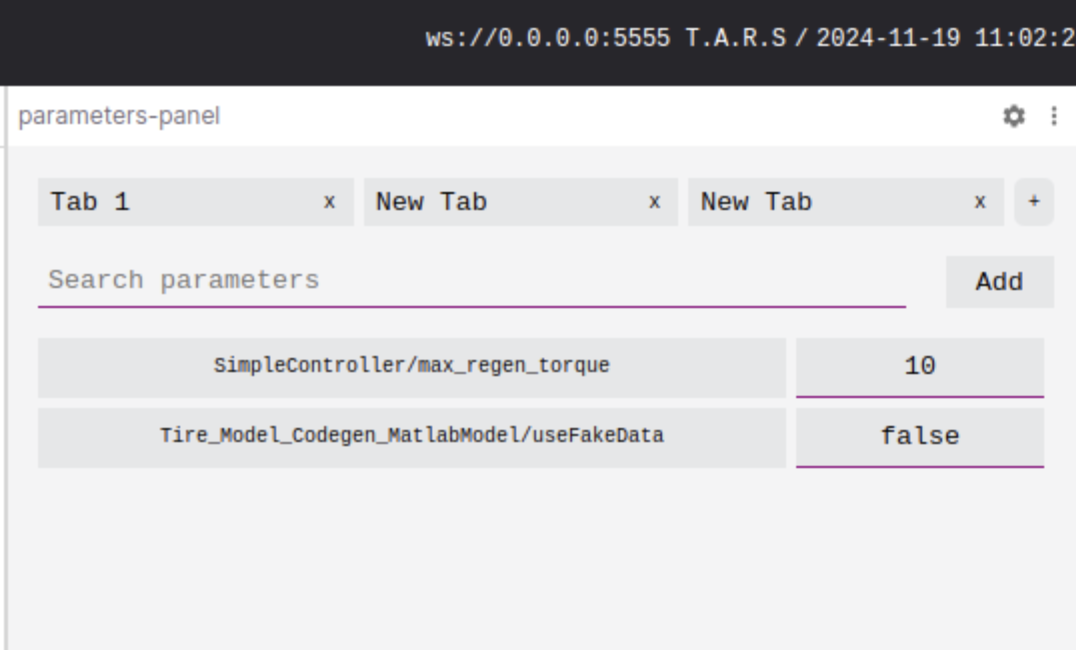
Foxglove Parameters Extension
Live-tuning parameters on robots/vehicles is very important for rapid development so I made an extension for the foxglove data viewer that makes this process easier.

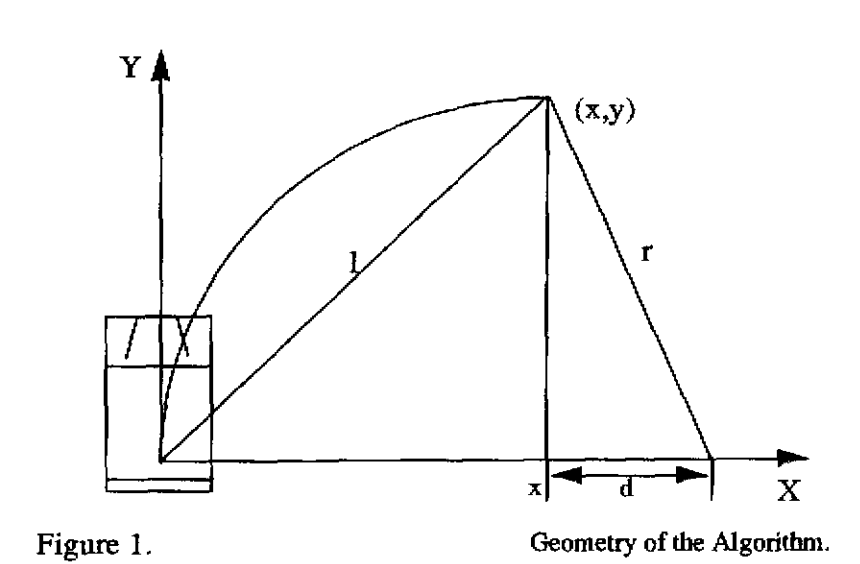
Pure Pursuit
Following trajectories accurately can be a difficult task so I implemented the pure pursuit algorithm custom tailored to my robotics teams’ needs.
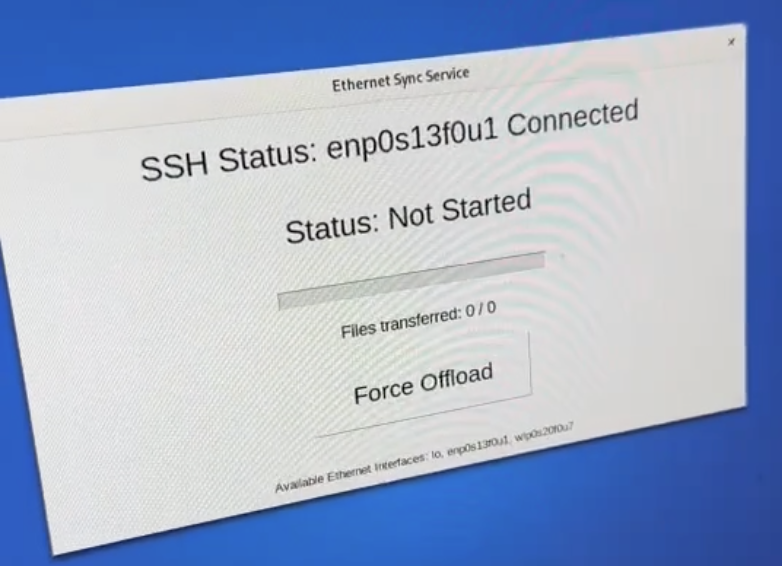
Data Acquisition Computer (for HyTech racing)
Created a computer running a custom Nix configuration along with a data offloading service that automatically detects ethernet interfaces and pulls new logs from the car and uploads them to our back end.
FRC 5940 Autonomous Modes
Created many autonomous modes for FRC team 5940, focusing on rapid development by breaking the problem down into smaller steps involving wheel radius characterization, vision, fusing vision and wheel odometry via a UKF, and trajectory generation/following.
